
La mano robótica:
inteligencia en los dedos

En síntesis
Las manos robóticas de precisión condensan, en un solo sistema, muchas de las claves del desarrollo tecnológico chino: sensorización, materiales avanzados, software de control, aprendizaje, integración rápida y adaptación funcional. No son un accesorio del robot, sino una expresión muy clara de cómo China articula módulos técnicos dentro de una misma arquitectura de ejecución. Su valor no está solo en lo que hacen, sino en lo que revelan: una forma de organizar capacidades, transferir soluciones entre sectores y reforzar una soberanía funcional basada en el dominio de tecnologías críticas y recombinables.
Introducción
Si un robot resume una arquitectura tecnológica, una mano robótica la condensa casi por completo.
En una pieza relativamente pequeña convergen mecánica de precisión, materiales avanzados, sensores, software, control, percepción, aprendizaje y capacidad industrial para integrarlo todo con rapidez. Por eso, observar el desarrollo de las llamadas dexterous hands en China no es fijarse en un accesorio del robot, sino en uno de los puntos donde mejor se ve cómo el país convierte módulos técnicos en soluciones funcionales. Y ahí vuelve a aparecer una idea que he venido observando durante años sobre el terreno en China: lo importante no es solo el producto final, sino el ecosistema que permite diseñarlo, adaptarlo, fabricarlo y desplegarlo.
Una pieza que condensa todo un sistema
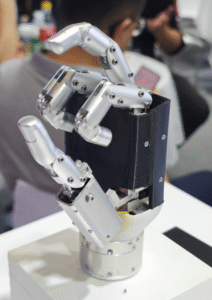
Tendemos a pensar en la mano robótica como un posible extremo final del brazo robótico. En realidad, conviene entenderla como un órgano técnico de altísima complejidad. Porque agarrar bien no consiste solo en cerrar unos dedos. Consiste en calcular fuerza, detectar textura, corregir desviaciones, ajustar presión, reconocer formas, anticipar deslizamientos y adaptar el gesto al contexto.
Eso explica por qué estas manos dicen tanto sobre la capacidad industrial. Para construirlas bien no basta con tener una buena carcasa o unos motores aceptables. Hace falta integrar una gran variedad de elementos, como sensores, actuadores, materiales flexibles, superficies adherentes, sistemas de control y entrenamiento, además de una red de proveedores y servicios capaz de iterar con rapidez. Dicho de otro modo: una mano robótica bien resuelta no es solo una pieza de ingeniería; es una prueba de arquitectura de ejecución.
Cómo se construyen
La construcción de una mano robótica combina varias capas que deben funcionar de forma coordinada.
Por un lado, una estructura física con distintos componentes mecánicos y materiales adaptados al uso. Por otro, una capa sensorial que permite detectar presión, fuerza, contacto, posición o deslizamiento. A ello se suma una capa de control, encargada de coordinar el movimiento y ajustar la interacción con el objeto. Y, cada vez más, aparece también una capa de aprendizaje y adaptación, apoyada en sistemas como la teleoperación, la visión por cámara, los guantes hápticos o distintos entornos de entrenamiento. Las manos robóticas que he podido observar en China incorporan, en muchos casos, sensibilidad en la yema, sensores de fuerza en varios ejes y materiales blandos y flexibles para mejorar adherencia y precisión.
Esa combinación es importante porque revela algo más amplio: China no está desarrollando solo “manos”, sino capacidades reutilizables. Los mismos principios de control fino, sensorización, precisión de movimiento y adaptación de materiales pueden reaparecer en prótesis, cirugía robótica, logística, inspección industrial, defensa o automatización comercial. Ésa es una de las claves del sistema industrial chino: no avanzar solo a partir de productos cerrados, sino mediante módulos recombinables que pueden trasladarse de un sector a otro.
Por ello, en mis análisis e informes suelo describir el modelo chino como una arquitectura modular, densa y diseñada para recombinar funciones industriales con rapidez.
idea clave
Una mano robótica bien resuelta no es solo una pieza de ingeniería; es una prueba de arquitectura de ejecución.
La forma depende de su función
Otro error frecuente consiste en imaginar una única forma ideal: una mano humanoide de cinco dedos. La realidad es bastante más interesante.
En China se observan configuraciones muy diversas: pinzas robóticas, manos de dos, tres, cuatro, cinco, seis o siete dedos, formas tentaculares, diseños blandos para objetos delicados y configuraciones industriales totalmente alejadas de la anatomía humana. Algunas imitan la morfología de la mano porque necesitan imitar la destreza humana. Otras no buscan parecer humanas, sino resolver una tarea de la forma más eficaz posible. En este campo, la forma importa menos que la función. La clave no era la forma, sino la funcionalidad.
Y esto tiene una lectura más profunda. La robótica china no parece obsesionada con el símbolo del humanoide por sí mismo. Su enfoque suele ser más pragmático: si una pinza resuelve mejor una tarea, se usa una pinza; si hacen falta cinco dedos, se diseñan cinco; si para cierto entorno basta con una geometría no antropomórfica, se prescinde del parecido humano. Esta lógica no es exclusiva de China y lleva tiempo presente en muchos entornos industriales. Pero en China suele aparecer con especial claridad y a gran escala: no se parte de una forma ideal, sino de la solución más eficaz para cada función.
La veradera frontera está en el tacto
El salto importante no está tanto en añadir más dedos como en conseguir que la mano “sienta”.
Una mano robótica útil no solo debe cerrar y abrir. Debe saber cuánto apretar, cuándo corregir, si el objeto resbala, si su superficie es dura o blanda, si conviene cambiar la postura o redistribuir la fuerza. Por eso los sensores y las texturas son tan importantes. Sensores de presión y fuerza en los dedos, materiales blandos para mejorar la adherencia, superficies diseñadas para distintos tipos de contacto y software capaz de interpretar todo eso en tiempo real convierten un sistema torpe en una mano verdaderamente precisa. Estas manos no solo agarran; entienden, ajustan y aprenden.

Aquí se juega buena parte del futuro del sector. Porque cuanto mejor sea el tacto artificial, mayor será la capacidad de estas manos para manipular componentes electrónicos, asistir en cirugía, recoger fruta sin dañarla, operar en laboratorios, cargar mercancía irregular, intervenir en centrales nucleares o entregar objetos en entornos logísticos y comerciales.
Cómo se controlan: del software a la intención
Aquí conviene ordenar bien las cosas, porque varios métodos se solapan. Yo los agruparía en cinco familias.
La primera es la más clásica: control por software y programación directa. Se le da a la mano una instrucción concreta, una secuencia o una tarea y el sistema la ejecuta dentro de ciertos parámetros que se ajustarán cuando sea necesario. Esto sigue siendo fundamental en industria, logística y automatización repetitiva.
La segunda es la teleoperación por demostración. Aquí entran variantes como los guantes con sensores, el seguimiento visual de la mano mediante cámara o las interfaces hápticas, que permiten trasladar un gesto humano a la mano robótica y acelerar su entrenamiento, ajuste y adaptación.
La tercera familia son los controladores tradicionales: mandos remotos, joysticks, controladores de realidad virtual o incluso mandos de videoconsola adaptados. No son la opción más sofisticada, pero siguen siendo útiles por coste, familiaridad y rapidez de despliegue, sobre todo en entornos de prueba, formación o teleoperación sencilla.

La cuarta familia es la interfaz bioeléctrica. Aquí ya no se traduce un gesto visible, sino señales fisiológicas del usuario. Es el caso de las prótesis avanzadas que leen impulsos musculares o tensiones de músculos y tendones en la parte del brazo que conserva la persona amputada. En mis visitas a BrainCo, empresa tecnológica que conozco bien y con la que mantengo una relación cercana, he podido ver cómo prótesis de manos, piernas y pies responden a impulsos musculares detectados por brazaletes con sensores. Es uno de los desarrollos más interesantes porque convierte la mano robótica en una extensión funcional del cuerpo. Un detalle especialmente revelador es que estas manos pueden separarse del brazo y seguir replicando el movimiento deseado cuando la persona activa esa intención mediante el brazalete.
La quinta familia es la interfaz neuronal o cerebro-máquina, todavía más avanzada. Aquí la intención del movimiento empieza a traducirse a partir de señales cerebrales, acercándonos a un tipo de control en el que la frontera entre prótesis, robot e interfaz cognitiva se vuelve cada vez más difusa. También he podido conocer desarrollos orientados a este tipo de conexión cerebro-máquina: manos robóticas y otros sistemas capaces de responder a señales cerebrales para controlar movimientos o accionar máquinas. Conviene ser prudentes con el grado exacto de madurez de cada solución, pero la dirección es clara: el control robótico se desplaza progresivamente desde la instrucción externa hacia la intención.
También actúan solas
Hay otra capa igual de importante: la autonomía.
Estas manos no siempre esperan una orden humana detallada. En muchos casos, están equipadas con cámaras, sensores y software de percepción para detectar el objeto, calcular tamaño, distancia, orientación, peso estimado, fragilidad o condiciones de contacto. A partir de ahí, ajustan la pinza, la fuerza y la trayectoria. Y es que la mano no puede separarse del sistema sensorial y cognitivo que la acompaña. La percepción, el control y la acción forman parte de una misma continuidad.
Por eso, una dexterous hand no debe analizarse sola. Es la convergencia de varios elementos, como visión artificial, sensorización, actuadores de precisión, software de control, IA aplicada y entrenamiento. Y ahí se ve bien cómo China integra IA, robótica y manufactura avanzada dentro de sus ecosistemas tecnológicos e industriales.
De la fábrica a la clínica,
del comercio a la defensa.
Las aplicaciones de la mano robótica son mucho más amplias de lo que parece, con usos que van del ensamblaje electrónico a la cirugía robótica, pasando por prótesis, automatización comercial y robótica de servicio. En estos años que llevo en China he podido ver, por ejemplo, tiendas, máquinas expendedoras de café o helado y farmacias operadas por robots donde un brazo robótico entrega el producto tras el pago.
Pero el alcance real va aún más lejos. Estas manos pueden ser decisivas en defensa y entrenamiento militar, tareas de riesgo como la manipulación de explosivos, mantenimiento en infraestructuras críticas, laboratorios químicos, centrales nucleares, logística automatizada, agricultura de precisión, medicina de rehabilitación, rescate en entornos peligrosos o exploración espacial y submarina. Cuando una tecnología domina el agarre, el tacto y el control fino, adquiere un valor transversal enorme. Ya no hablamos solo de una mano: hablamos de una capacidad industrial estratégica que puede insertarse en múltiples cadenas de valor.

Lo que revelan sobre China
Las manos robóticas de precisión no importan solo por lo que hacen, sino por lo que revelan: una forma de organizar capacidades. Una cultura tecnológica orientada menos al icono y más a la función. Una arquitectura productiva capaz de conectar proveedores, sensores, materiales, software, integración y aplicación sectorial con muy poca fricción.
Y revelan también algo importante para cualquier análisis estratégico de China para Europa: que muchas de las ventajas decisivas del futuro no vendrán únicamente del producto final visible, sino del dominio de módulos reutilizables, inputs críticos y ritmos de ejecución. En mis informes y análisis suelo explicar que la soberanía industrial depende menos del control del producto final que del dominio de capacidades reutilizables, inputs críticos y ritmos de escalado.
La mano como mapa
Como vemos, una mano robótica puede parecer símplemente una pieza de una máquina, pero es mucho más.
Es un mapa a escala reducida de cómo se construye hoy la capacidad industrial. En ella confluyen mecánica, sensorización, materiales, control, inteligencia, salud, manufactura avanzada y aprendizaje máquina. Y por eso resulta tan útil observarlas en China: porque permiten ver, en miniatura, cómo funciona un ecosistema mayor.
Ésa es una de las lecciones más valiosas que dejan ver los ecosistemas tecnológicos e industriales de China: el poder no siempre se anuncia con grandes palabras. A veces aparece en algo mucho más concreto: en la precisión de un dedo, en la textura de una yema artificial, en la capacidad de una máquina para tocar sin romper.
Si te interesa profundizar en estas tecnologías, en sus aplicaciones o en el ecosistema chino que las sostiene, puedes contactarme directamente.

Una última idea
En el fondo, la mano robótica no anticipa solo una nueva generación de máquinas; anticipa también una nueva forma de construir capacidad industrial: más precisa, más sensible y más capaz de traducir inteligencia en ejecución.

Contáctanos si te interesa profundizar en estas tecnologías, sus aplicaciones o el ecosistema que las sostiene.
